|
2.3 Calibration
|
This chapter applies to the Sensor Fusion algorithms developed by Helios Avionics (used in the Helios Avionics SensorBox and for internal tablet/smartphone sensors).
|
|
|
|
Depending on the situation, it is recommended to calibrate different error sources to get the best possible and most reliable attitude estimation. |
|
|
2.2.1 Installation error
|
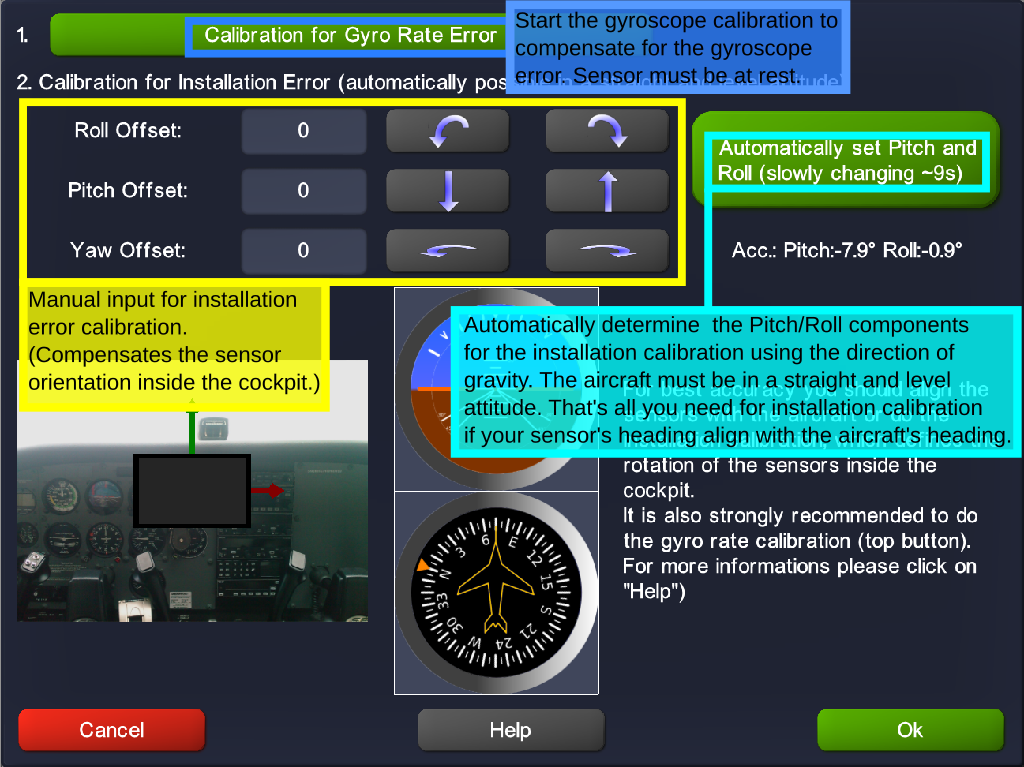
The sensors are usually not perfectly aligned with the aircraft. This results in a difference between the sensor's attitude and the aircraft's attitude. To get the best attitude estimation for the aircraft this "installation error" must be compensated.
This is done by defining the rotation of the sensors inside the cockpit by setting the Pitch (Nose Up and Down), Yaw (Heading) and Roll (Bank) angles. You can press the arrow buttons next to the corresponding values to alter each angle. The result will be shown in the 3D Rotation Preview as well as in the Attitude and Heading Indicator.
To make it easier, it is possible to automatically determine the Pitch and Roll angles from the direction of gravity. For this the aircraft must be in a straight and level attitude.
Manual calibration is not necessary if your sensors are aligned with the aircraft's heading. If they are not aligned, you can still determine Pitch and Roll automatically and afterwards manually adjust the Yaw angle. |
|
|
2.2.2 Gyroscope error/bias
|
The gyroscope measures the angular velocity of all three axis. The measurements are afflicted with an error. If this error is large it results in a inaccurate attitude estimation. The error can be determined by averaging the gyroscope output over a given time period while the gyroscope is at rest. If you press the "Gyro rate Calibration" button this error will be determined and later on subtracted from the gyroscope measurements. It is important that your sensor is at rest, otherwise it results in a bad calibration.
Please note that the gyroscope bias may drift over a long time, which means the calibration should be done on a regular basis (for example before each flight) for best accuracy. |
|
|
2.2.3 Automatic gyroscope calibration
|
|
There is an automatic gyroscope calibration built within the SensorFusion algorithms. It determines the gyroscope bias from the fusion steps. This automatic calibration runs all the time (while estimating attitude), which means you can even get a useful gyroscope calibration if you haven't done the manual calibration. The results of the automatic calibration are usually less good than the results of the manual calibration and it also may take some time until a good calibration is determined automatically. Therefore it is recommended to perform the manual calibration for best accuracy. |
|
|
|