3.2.4 Flight Plans
Flight Plans are calculated based on the current position and can be recalculated by using the "Refresh" button (useful in case of a siginificant deviation from the original flight plan during flight).
For planning purposes the current position can be set manually using the "Flight Planning Mode".
When clicking 'Insert' or respectively 'Insert Fix', the new Procedure is inserted to the FlighPlan at the most practicable place. Otherwise, the new Procedure is inserted after the current Procedure and becomes the new current Procedure (e.g. via 'Add Directly').
Flight Plans can be rearranged / saved and loaded using the Flight Plan menu.

This exemplary Flight Plan consists of: Direct NOTGA (GNSS/GPS fix) -> Direct GUPIN (GNSS/GPS fix) -> Approach Runway 25 EDDS (Stuttgart).
On top of the Flight Plan window you see the total distance, the estimated time for all procedures and the estimated fuel consumption for all procedures.
On top of the Flight Plan window you see the total distance, the estimated time for all procedures and the estimated fuel consumption for all procedures.
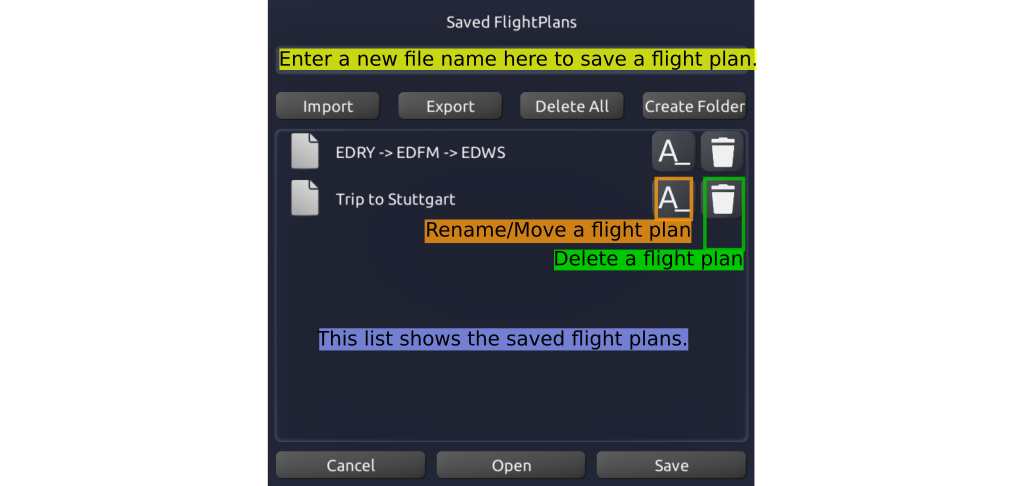
Press "Saved Flight Plans" to show this list of previously saved flightplans.
To save a flight plan: Enter a name for the flight plan and press "Save".
To open a flight plan: Select a flight plan from the list and press "Open".
The flight plans can be exported to a single backup file. You can retrieve the file with usual means of your platform. Flight Plans can also be synchronized via the Horizon cloud across your devices using the synchronization menu.
Flight plans can be arranged in folders but empty folders will not persist. To save a new flight plan in a new folder press the "Create Folder" button. To move an existing flight plan to another folder simply modify the path via the rename method.
To save a flight plan: Enter a name for the flight plan and press "Save".
To open a flight plan: Select a flight plan from the list and press "Open".
The flight plans can be exported to a single backup file. You can retrieve the file with usual means of your platform. Flight Plans can also be synchronized via the Horizon cloud across your devices using the synchronization menu.
Flight plans can be arranged in folders but empty folders will not persist. To save a new flight plan in a new folder press the "Create Folder" button. To move an existing flight plan to another folder simply modify the path via the rename method.